Harmonious Robotics: A Self-Sustaining System
In the evolving landscape of robotics, a key challenge is integrating diverse modalities—perception, navigation, physical interaction, and high-level planning—into a unified, self-sustaining system. Instead of treating each component in isolation, we propose an architecture where these elements function in harmony, dynamically influencing and reinforcing one another.
The Core Concept
A truly autonomous robot must go beyond rigid, rule-based behaviors and instead adapt to its environment in real time. Our approach enables this by interweaving multiple capabilities into a feedback loop that ensures:
- Perception informs action: Vision, speech, and sensor data are continuously processed to refine decision-making.
- Navigation is contextualized: Spatial awareness isn’t just about mapping obstacles but also about understanding movement in relation to goals.
- Physical interactions are intuitive: The robot’s ability to move and sense touch helps it react naturally to external stimuli.
- High-level planning adapts dynamically: Rather than executing pre-defined tasks, the system adjusts based on real-world conditions.
The Architecture
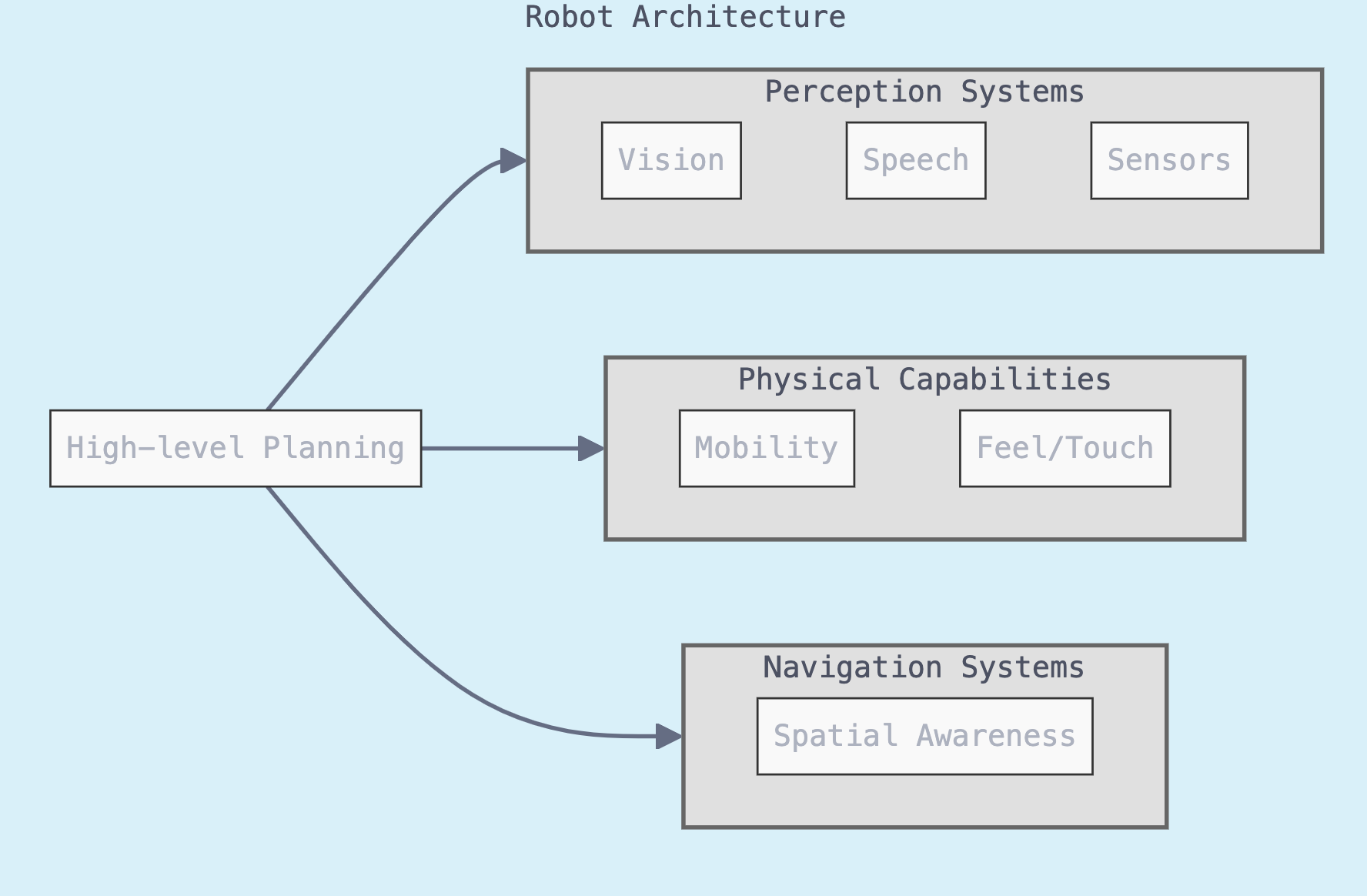
The Self-Sustaining Feedback Loop
Each subsystem contributes data and insights that reinforce the entire architecture. This self-sustaining design ensures:
✅ Continuous learning - The system refines its behaviors based on past interactions.
✅ Dynamic adaptation - It adjusts to unexpected scenarios without predefined rules.
✅ Energy efficiency - By balancing physical movements and computational resources, the system optimizes itself for longevity.
Why This Matters
Traditional robotics often focuses on improving singular components, but real-world deployment demands a holistic approach. By merging modalities into a seamless, self-reinforcing system, we unlock new frontiers in robotics—capable of sustained autonomy, intelligent decision-making, and meaningful human-robot interaction.
🚀 This is just the beginning. As we refine this architecture, the goal is to create truly independent, intelligent machines that thrive in the real world.